
標準化硬體平台
針對物流、倉儲及公共空間優化的成熟型號,已通過長效續航力與環境穩定性測試。

VDS-Logistics Mini
MOD-01X專為動態變化的狹小空間設計。透過多傳感器融合技術(SLAM 與 LIDAR),可實現毫米級的精確停靠。內置電池快速置換技術 (Swap-and-Go),協助工業現場達成零停機生產。
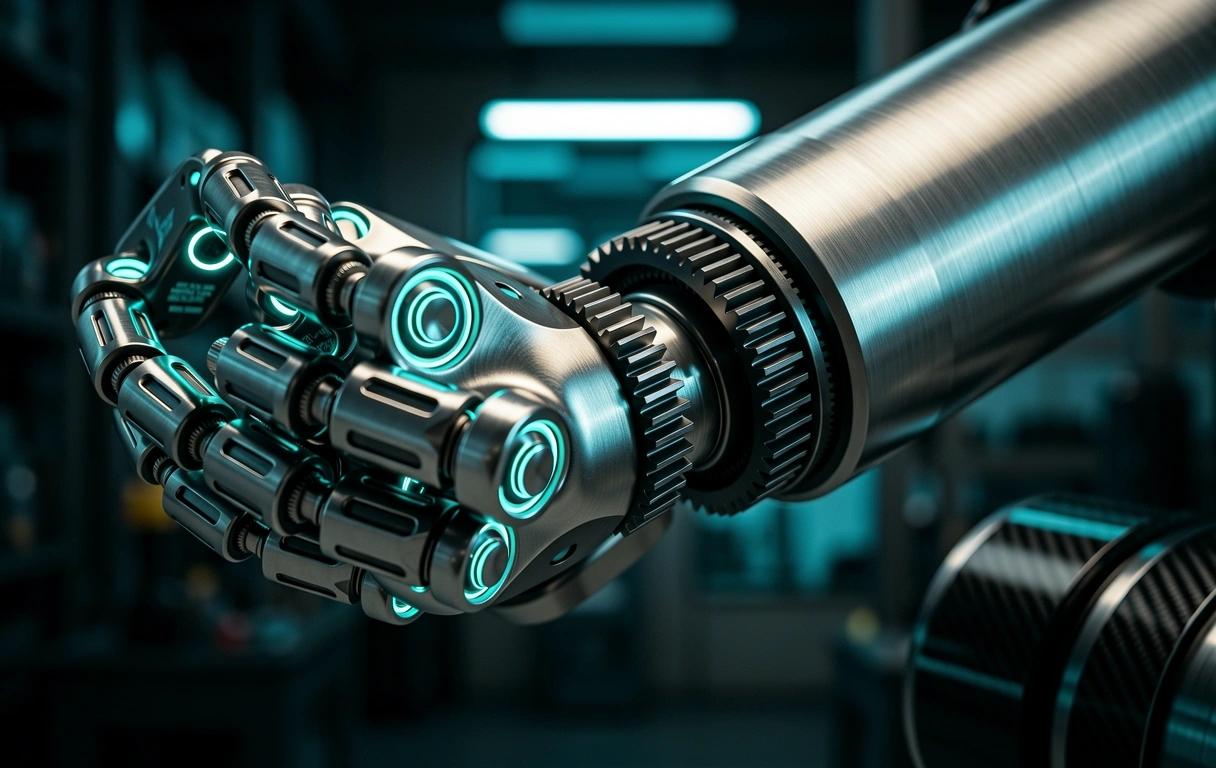
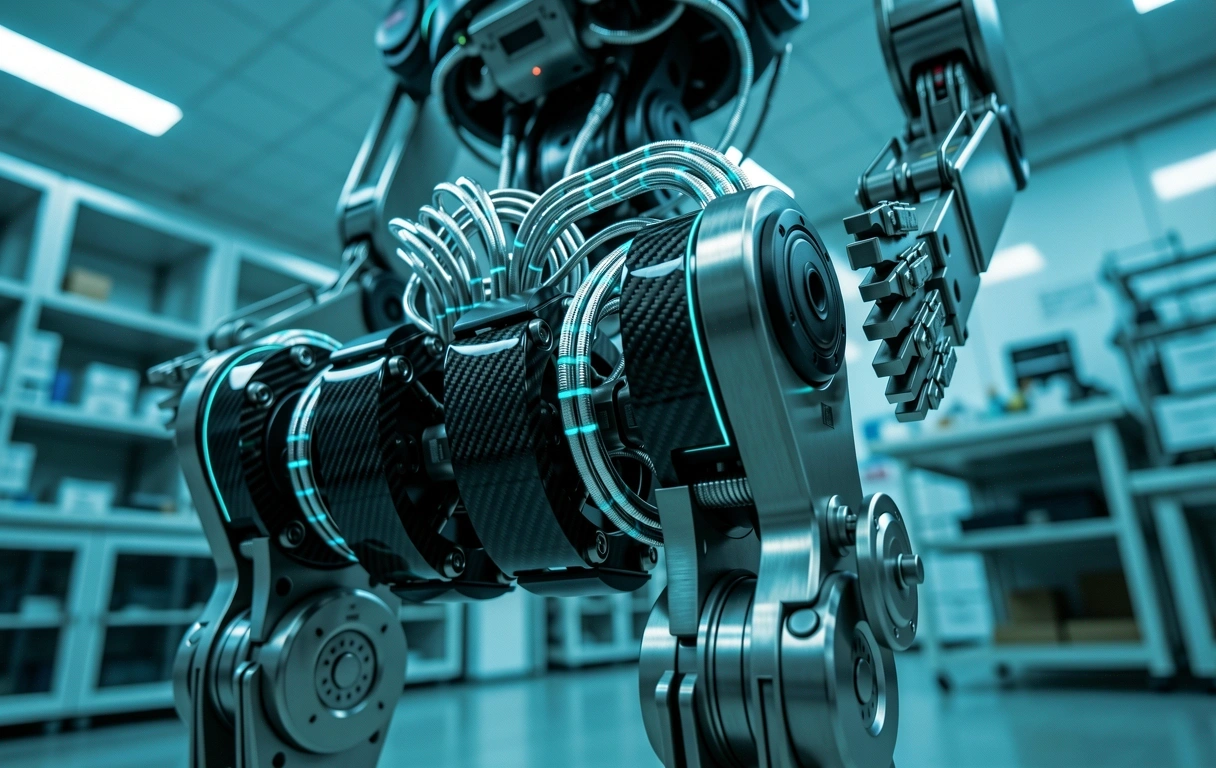
VDS-Arm 6-Axis
MOD-02A針對精密元件組裝開發的 6 軸協作手臂。採用輕量化碳纖維材料,結合柔性夾持技術,能根據不同物體形狀自動調節壓力,防止精密零件在抓取過程中受損。
次世代研發原型
此區域展示我們研發團隊在非結構化環境與特種巡檢領域的初步探索。以下型號目前僅供內部研發及特定學術合作使用,尚未對外啟動商業化部署。

Alpha 四足移動平台
研發目標:測試在複雜地形與惡劣天氣條件下的移動穩定性。採用封閉式動力系統,目前處於模擬雜亂環境的路徑規劃與避障邏輯驗證階段。

環境巡檢集成原型
研發目標:整合熱成像監控與有害氣體偵測模組。展示機器人在無人車間進行全天候安全排除的能力。
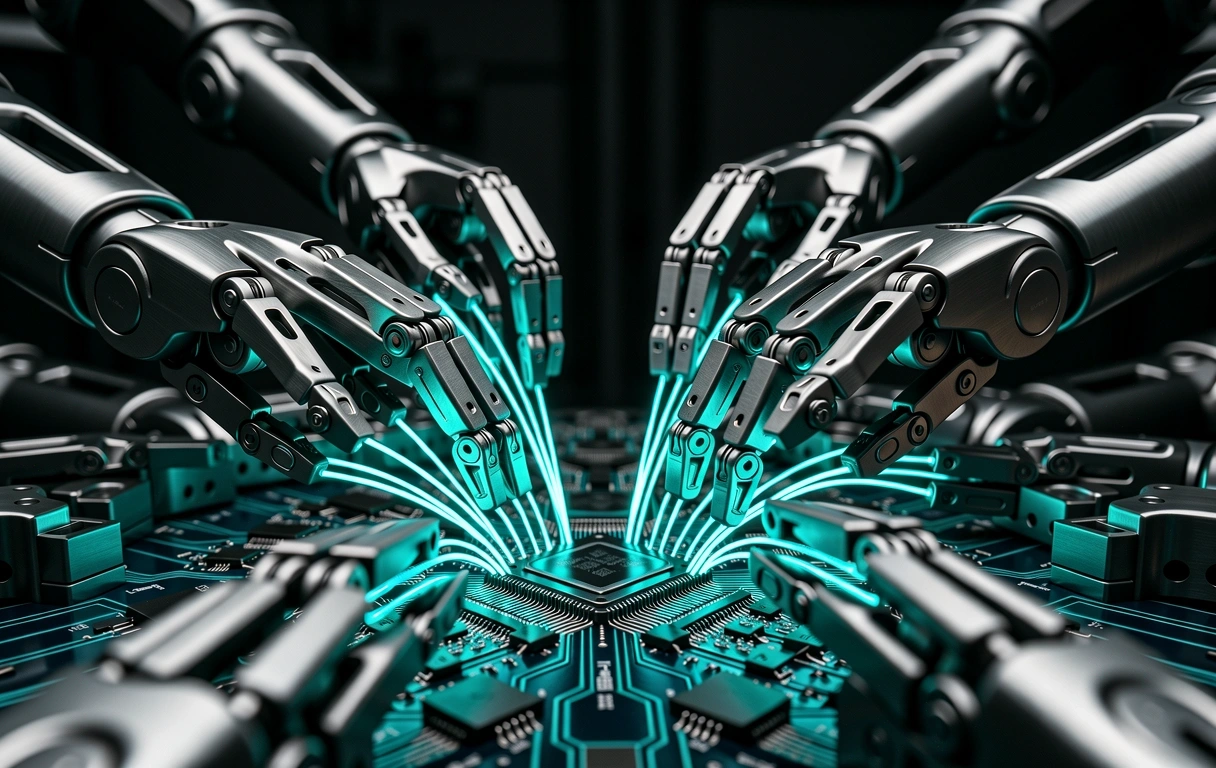
群體協作調度系統
研發目標:優化各型號機器人間的通訊與路徑優化算法。目標是顯著減少在交叉路口的等待時間,提升整體物流效率。
獲取完整產品規格手冊
獲取當前版本所有型號的詳細負載參數、續航時長數據與系統整合協議。
我們如何定義
工程卓越?
需求評估與環境掃描
在每項原型進入開發前,我們的團隊會對潛在場景的作業流程進行深度分析,確保機器人結構能適應物流現場的物理瓶頸(如窄道、坡度)。
人機共存安全機制
我們所有的產品線皆內置力矩回饋與視覺緩衝區域的雙重互鎖系統。這保證了在與工作人員共同作業時,系統能進行毫秒級的暫停響應。
軟硬體整合模組化
獨特的底盤架構允許用戶根據載重需求靈活更換執行工具,從吸盤到夾爪,大幅縮短了針對新任務所需的停機調整時間。
精準路徑規劃演算法
利用 SLAM 與 LIDAR 融合技術,我們的設備能在不依賴外部導引線的情況下,在動態環境中維持高達厘米級的重複定位精度。